C API Manual
Introduction to the API
The C API is the underlying API of Vimba X.
See also
To understand the API, read the SDK Manual first: It contains essential information. For a quick start, use the examples.
API usage
API version
Even if new features are introduced to the C API, your software
remains backward compatible. Use VmbVersionQuery() to check
the version number of the C API. You can run this function without
initializing the API.
API startup and shutdown
To start and shut down the API, use these paired functions:
The function
VmbStartup():Initializes the API.
Enumerates interfaces and cameras and retrieves the Camera handle.
Has an optional parameter. You can use this parameter to select which transport layers are used.
The function
VmbShutdown():Blocks until all callbacks have finished execution.
Shuts down the API as soon as all callbacks are finished.
The functions VmbStartup() and VmbShutdown() must always be paired.
Calling the pair several times within the same program is possible,
but not recommended.
To free resources, shut down the API when you don’t use it. Shutting down
the API closes all opened cameras.
See also
For details about the optional parameter, see the SDK Manual, chapter TL activation and deactivation and the ListCameras example.
Listing cameras
See also
For a quick start, see the ListCameras example.
The function VmbCamerasList() enumerates all cameras recognized by
the underlying transport layers. With this command, you can
fetch all static details of a camera such as:
Camera ID or extended ID
Camera model
Name or ID of the connected interface (for example, the NIC)
Extended ID
Tip
In most cases, the Extended ID is not needed. You can use it as needed.
If several TLs are available for one camera, the camera is listed several times.
To avoid potential conflicts, the SDK automatically creates an extended ID string for each camera.
extended ID string is provided in the struct VmbCameraInfo_t: cameraIdStringExtended.
Extended IDs use the following grammar:
extended_id : <tl_identifier-char-count> separator tl_identifier <interface_id-char-count>
separator interface_id <camera_id-char-count> separator camera_id separator : ':'`
Note
Extended IDs always overwrite other ids. A non-extended ID may be unusable after other cameras are discovered.
Placeholder |
Description |
|---|---|
tl_identifier |
File path of the transport layer |
interface_id |
ID of the interface as reported by the transport layer |
camera_id |
Camera (non-extended) ID as reported by the interface |
<tl_identifier-char-count> |
Number of characters (TL ID) encoded as decimal integer |
<interface_id-char-count> |
Number of characters (interface ID) encoded as decimal integer |
<camera_id-char-count> |
Number of characters encoded as decimal integer |
The order in which the detected cameras are listed is determined by the order of camera discovery and therefore not deterministic. Moreover, the order may change depending on your system configuration and the accessories (for example, hubs or long cables).
GigE cameras
Listing GigE cameras requires a certain amount of time. By default, GeVDiscoveryAllAuto().
is enabled. You can easily enable GeVDiscoveryAllOnce() in VmbC.xml if you want to
reduce bandwidth.
USB cameras
Changes to the plugged cameras are detected automatically. Therefore, all changes to the camera list are announced via discovery event. All listed commands are applied to all network interfaces, see the code snippet below.
Camera Link cameras
The specifications of Camera Link and GenCP do not support plug & play or
discovery events. To detect changes to the camera list, shutdown and startup
the API by calling VmbSystem::Shutdown and VmbSystem::Startup consecutively.
MIPI CSI cameras
Cameras with MIPI CSI-2 interface are detected when the board is booted. To avoid damage to the hardware, do not plug in or out a camera while the board is powered.
VmbUint32_t nCount;
VmbCameraInfo_t* pCameras;
// Get the number of connected cameras
err = VmbCamerasList( NULL , 0, &nCount , sizeof *pCameras );
if ( VmbErrorSuccess == err )
{
// Allocate accordingly
pCameras = (VmbCameraInfo_t *) malloc( nCount * sizeof *pCameras );
// Get the cameras
err = VmbCamerasList( pCameras , nCount , &nCount , sizeof *pCameras );
// Print out each camera's name
for ( VmbUint32_t i=0; i<nCount; ++i )
{
printf( " %s\n", pCameras[i]. cameraName );
}
}
Struct VmbCameraInfo_t
Struct VmbCameraInfo_t provides the entries listed in the table below
for obtaining information about a camera. You can query the struct with
the functions VmbCamerasList() and VmbCameraInfoQueryByHandle().
To access all GenTL modules via this struct:
To access all GenTL modules via this struct, first open the camera and call
VmbCameraInfoQuery().Alternatively, use
VmbFeatureIntValidValueSetQuery(), which uses a local or remote device handle. This function returns an error if the handle is invalid or the camera associated with the handle is no longer open.
Type |
Field |
Purpose |
|---|---|---|
const char* |
cameraIdString |
Unique identifier for each camera |
const char* |
cameraIdStringExtended |
Extended unique identifier for each camera |
const char* |
cameraName |
Name of the camera |
const char* |
modelName |
The model name |
VmbAccessMode_t |
permittedAccess |
See VmbAccessModeType |
VmbHandle_t |
transportLayerHandle |
Handle for the transport layer (system) module |
VmbHandle_t |
interfaceHandle |
Handle for the interface module |
VmbHandle_t |
localDeviceHandle |
Handle for the local device (camera) module |
VmbHandle_t |
streamHandles |
Array of handles for the stream modules |
VmbHandle_t |
streamCount |
Number of entries in the streamHandles array |
Enabling notifications of changed camera states
To get notified whenever a camera is detected or disconnected, use
VmbFeatureInvalidationRegister() to register the event EventCameraDiscovery.
Use the global Vmb handle for registration. The function pointer to
the callback function has to be of type VmbInvalidationCallback().
The callback gets executed on the according camera discovery event.
Note
Functions that must not be called within the camera notification callback:
VmbStartup
VmbShutdown
VmbCameraOpen
VmbCameraClose
VmbFeatureIntSet (and any other VmbFeature*Set function)
VmbFeatureCommandRun
Opening and closing a camera
A camera must be opened to control it and to capture images.
Call VmbCameraOpen() and provide the ID of the camera and the desired access mode.
Note
The function VmbCameraOpen() returns a handle to the camera only.
The API provides several access modes:
VmbAccessModeFull: read and write access. Use this mode to configure the camera features and to acquire images (Goldeye CL cameras: configuration only).
VmbAccessModeRead: read-only access. Setting features is not possible. However, for GigE cameras that are already in use by another application, the acquired images can be transferred to the API (Multicast).
The enumerations are defined in VmbAccessModeType (or its VmbUint32_t representation VmbAccessMode_t).
Enumeration Integer Value |
Integer Value |
Purpose |
|---|---|---|
VmbAccessModeNone |
0 |
No access |
VmbAccessModeFull |
1 |
Read and write access |
VmbAccessModeRead |
2 |
Read-only access |
When a camera has been opened successfully, a handle for further access is returned.
An example for opening a camera retrieved from the camera list is shown in the code snippet below.
VmbCameraInfo_t *pCameras;
VmbHandle_t hCamera;
// Get all known cameras as described in chapter "Listing available cameras"
// Open the first camera
if ( VmbErrorSuccess == VmbCameraOpen( pCameras [0]. cameraIdString ,
VmbAccessModeFull , hCamera ) )
{
printf( "Camera opened , handle [0x%p] retrieved .\n", hCamera );
}
The code snippet below shows how to close a camera using VmbCameraClose()
and the previously retrieved handle.
if ( VmbErrorSuccess == VmbCameraClose( hCamera ) )
{
printf( "Camera closed .\n" );
}
Listing transport layers
The function VmbTransportLayersList() enumerates all found TLs.
See also
To control which TLs are loaded or ignored, see TL activation and deactivation.
See also
The AsynchrounousGrab example lists all loaded TLs.
Struct VmbTransportLayerInfo_t
The struct VmbTransportLayerInfo_t holds read-only information about a transport layer.
You can use it to retrieve a handle to the transport layer.
You can query the struct with the function VmbTransportLayersList().
Type |
Field |
|---|---|
const char* |
transportLayerIdString |
VmbInterface_t |
transportLayerType |
const char* |
transportLayerName |
const char* |
transportLayerPath |
VmbHandle_t |
transportLayerHandle |
Accessing features
See also
To quickly learn how to list features of the GenTL modules, see the ListFeatures example.
The function VmbCameraOpen() returns a handle to the camera, which can be used
for accessing the camera features. The features of the other GenTL modules
(system, interface, device, stream) can be accessed with the corresponding handle.
These handles are part of the following structs:
VmbCameraInfo_t
VmbInterfaceInfo_t
VmbSystemInfo_t
Feature types
The C API provides several feature types, which all have their specific properties and functionalities. The API provides its own set of access functions for every feature data type.
Feature Type |
Operation |
Function |
|---|---|---|
Enumeration |
Set |
VmbFeatureEnumSet |
Get |
Get VmbFeatureEnumGet |
|
Range |
VmbFeatureEnumRangeQuery |
|
Other |
VmbFeatureEnumIsAvailable |
|
VmbFeatureEnumAsInt |
||
VmbFeatureEnumAsString |
||
VmbFeatureEnumEntryGet |
||
Integer |
Set |
VmbFeatureIntSet |
Get |
VmbFeatureIntGet |
|
Range |
VmbFeatureIntRangeQuery |
|
Other |
VmbFeatureIntIncrementQuery |
|
Float |
Set |
VmbFeatureFloatSet |
Get |
VmbFeatureFloatGet |
|
String |
Set |
VmbFeatureStringSet |
Get |
VmbFeatureStringGet |
|
Range |
VmbFeatureStringMaxlengthQuery |
|
Boolean |
Set |
VmbFeatureBoolSet |
Get |
VmbFeatureBoolGet |
|
Command |
Set |
VmbFeatureCommandRun |
Get |
VmbFeatureCommandIsDone |
|
Raw data |
Set |
VmbFeatureRawSet |
Get |
VmbFeatureRawGet |
|
Range |
VmbFeatureRawLengthQuery |
|
Struct VmbFeatureInfo_t
Struct Entry |
Purpose |
|---|---|
const char* name |
Name used in the API |
const char* displayName |
Enumeration entry name to be used in GUIs |
VmbFeatureVisibility_t visibility |
GUI visibility |
const char* tooltip |
Short description, e.g. for a tooltip |
const char* description |
Longer description |
const char* sfncNamespace n |
Namespace this feature resides in |
VmbInt64_t intValue |
Integer value of this enumeration entry |
Enumeration |
Integer Value |
Purpose |
|---|---|---|
VmbFeatureDataInt |
1 |
64-bit integer feature |
VmbFeatureDataFloat |
2 |
64-bit floating point feature |
VmbFeatureDataEnum |
3 |
Enumeration feature |
VmbFeatureDataString |
4 |
String feature |
VmbFeatureDataBool |
5 |
Boolean feature |
VmbFeatureDataCommand |
6 |
Command feature |
VmbFeatureDataRaw |
7 |
Raw (direct register access) feature |
VmbFeatureDataNone |
8 |
Feature with no data |
Enumeration |
Integer Value |
Purpose |
|---|---|---|
VmbFeatureFlagsRead |
1 |
Static info about read access. Current status depends |
VmbFeatureFlagsWrite |
2 |
Static info about write access. Current status depends |
VmbFeatureFlagsVolatile |
8 |
Value may change at any time |
VmbFeatureFlagsModifyWrite |
16 |
Value may change after a write |
Enumeration |
Integer value |
Purpose |
|---|---|---|
VmbFeatureVisibilityUnknown |
0 |
Feature visibility is not known |
VmbFeatureVisibilityBeginner |
1 |
Feature is visible in feature list (beginner) |
VmbFeatureVisibilityExpert |
2 |
Feature is visible in feature list (expert level) |
VmbFeatureVisibilityGuru |
3 |
Feature is visible in feature list (guru level) |
VmbFeatureVisibilityInvisible |
4 |
Feature is hidden |
VmbFeatureInfo_t *pFeatures;
VmbUint32_t nCount = 0;
VmbHandle_t hCamera;
// Open the camera as shown in chapter "Opening and closing a camera"
// Get the number of features
VmbError_t err = VmbFeaturesList( hCamera , NULL , 0, &nCount , sizeof *pFeatures );
if ( VmbErrorSuccess == err && 0 < nCount )
{
// Allocate accordingly
pFeatures = (VmbFeatureInfo_t *) malloc( nCount * sizeof *pFeatures );
// Get the features
err = VmbFeaturesList( hCamera , pFeatures , nCount , &nCount ,
sizeof *pFeatures );
// Print out their name and data type
for ( int i=0; i<nCount; ++i )
{
printf( "Feature '%s' of type: %d\n", pFeatures[i].name ,
pFeatures[i]. featureDataType );
}
}
VmbHandle_t hCamera;
// Open the camera as shown in chapter "Opening a camera"
VmbInt64_t nWidth;
if ( VmbErrorSuccess == VmbFeatureIntGet( hCamera , "Width", &nWidth ))
{
printf("Width: %ld\n", nWidth );
}
VmbHandle_t hCamera;
// Open the camera as shown in chapter "Opening a camera"
if ( VmbErrorSuccess == VmbFeatureEnumSet( hCamera , "AcquisitionMode",
"Continuous" ))
{
if ( VmbErrorSuccess = VmbFeatureCommandRun( hCamera , "AcquisitionStart" ))
{
printf( "Acquisition successfully started\n" );
}
}
Camera features
To query all available features of a camera, use VmbFeaturesList().
This list does not change while the camera is opened.
Information about enumeration features, such as string and integer representation,
is held in struct VmbFeatureEnumEntry_t.
Struct VmbFeatureEnumEntry_t
Struct entry |
Purpose |
|---|---|
const char* name |
Name used in the API |
const char* displayName |
Enumeration entry name to be used in GUIs |
VmbFeatureVisibility_t visibility |
GUI visibility |
const char* tooltip |
Short description, e.g. for a tooltip |
const char* description |
Longer description |
const char* sfncNamespace |
Namespace this feature resides in |
VmbInt64_t intValue |
Integer value of this enumeration entry |
The C API provides separate access to the feature lists of all GenTL modules.
Note
Some features aren’t always available. For example, some features
cannot be accessed while the camera is acquiring images. To query the
current accessibility of a feature, call VmbFeatureAccessQuery().
The following table shows basic features of all cameras. A feature has a name, a type, and access flags such as read-permitted and write-permitted.
Feature Type |
Type |
Access flags |
Description |
|---|---|---|---|
AcquisitionMode |
Enumeration |
R/W |
Acquisition mode of the camera. Value |
AcquisitionStart |
Command |
Start acquiring images. |
|
AcquisitionStop |
Command |
Stop acquiring images. |
|
PixelFormat |
Enumeration |
R/W |
The image format (Mono8 etc.) |
Width |
Uint32 |
Image width, in pixels. |
|
Height |
Uint32 |
Image height, in pixels. |
|
PayloadSize |
Uint32 |
Recommendation: Use VmbPayloadSizeGet() |
To get notified whenever a feature value changes, use VmbFeatureInvalidationRegister() to
register a callback that gets executed on the according event. For camera features, use the camera
handle for registration. The function pointer to the callback function has to be of type
VmbInvalidationCallback*().
Acquiring images
See also
The SDK Manual describes synchronous and asynchronous image acquisition.
See also
For a quick start, see the SynchronousGrab example.
Image Capture vs. Image Acquisition
Image capture and image acquisition are two independent operations: The API captures images, the camera acquires images. To obtain an image from your camera, setup the API to capture images before starting the acquisition on the camera:
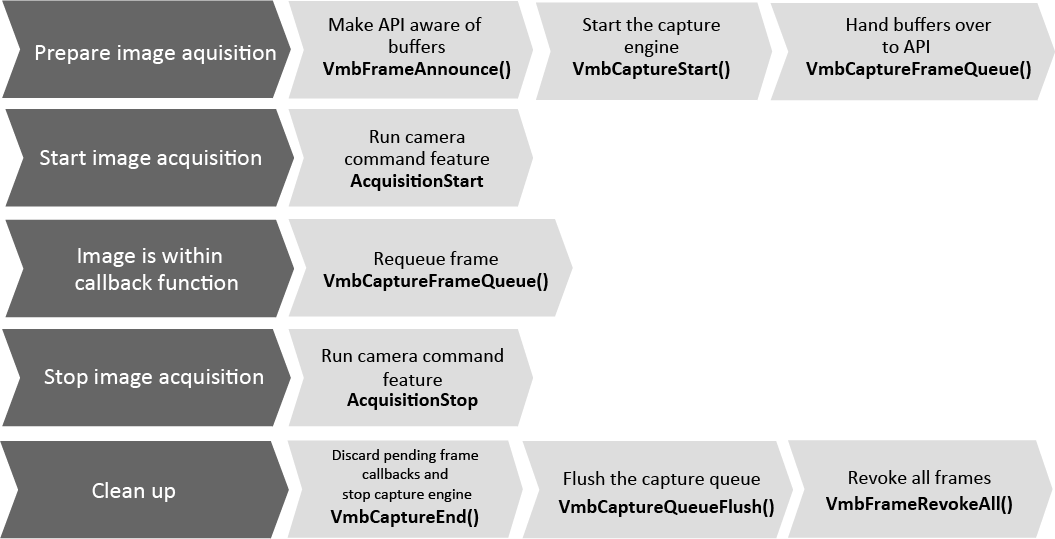
Typical asynchronous application using VmbC
Image Capture
To enable image capture, frame buffers must be allocated and the API must be prepared for incoming frames.
Optionally, you can activate the alloc and announce functionality for more efficient buffer allocation. To do this, use the optional parameter /x.
Note
CSI-2 cameras only:
We recommend using alloc and announce. If you want to use the announce mode with the CSI TL, you must take care of the buffer alignment (which is not necessary when using alloc and announce). To do this:
Query the required buffer alignment using the StreamBufferAlignment feature of the Stream module.
Use the returned value for buffer allocation, for example, with the function
aligned_alloc.Announce buffers as usual, see the description below.
To capture images sent by the camera, follow these steps:
Open the camera as described in chapter Opening and closing a camera.
Query the necessary buffer size through the convenience function
VmbPayloadSizeGet()(to avoid errors, do not use thePayloadSize()function).Announce the frame buffers. If you announce NULL buffers, the TL announces buffers with a suitable value.
Start the capture engine.
Queue the frame you have just created with
VmbCaptureFrameQueue(), so that the buffer can be filled when the acquisition has started.
The API is now ready. Start and stop image acquisition on the camera as described in chapter Image Acquisition. How you proceed depends on the acquisition model you need:
Synchronous: Use VmbCaptureFrameWait to receive an image frame while blocking your execution thread.
Asynchronous: Register a callback that gets executed when capturing is complete. Use the camera handle for registration. The function pointer to the callback function has to be of type
VmbFrameCallback*`(). Within the callback routine, queue the frame again after you have processed it.
Stop the capture engine and discard all pending callbacks with
VmbCaptureEnd().Call
VmbCaptureQueueFlush()to cancel all frames on the queue.Revoke the frames with
VmbFrameRevokeAll()to clear the buffers.
To assure correct continuous image capture, queue at least two or three frames. The appropriate number of frames to be queued in your application depends on the frames per second the camera delivers and on the speed with which you are able to re-queue frames (also depending on the load of your operating system). The image frames are filled in the same order in which they were queued.
Note
Always check that VmbFrame_t.receiveStatus equals VmbFrameStatusComplete when a frame is returned to ensure the data is valid.
Note
Functions that must not be called within the Frame callback routine:
VmbStartup
VmbShutdown
VmbCameraOpen
VmbCameraClose
VmbFrameAnnounce
VmbFrameRevoke
VmbFrameRevokeAll
VmbCaptureStart
VmbCaptureEnd
Image Acquisition
As soon as the API is prepared (see Image Capture, you can start image acquisition on your camera:
Set the feature AcquisitionMode (for example, Continuous).
Run the command AcquisitionStart.
To stop image acquisition, run command AcquisitionStop.
#define FRAME_COUNT 3 // We choose to use 3 frames
VmbError_t err; // Functions return an error code to
// check for VmbErrorSuccess
VmbHandle_t hCamera // A handle to our opened camera
VmbFrame_t frames[FRAME_COUNT ]; // A list of frames for streaming
VmbUInt64_t nPLS; // The payload size of one frame
// The callback that gets executed on every filled frame
// For smooth image acquisition, perform the callback as fast as possible
void VMB_CALL FrameDoneCallback( const VmbHandle_t hCamera, const VmbHandle_t hStream, VmbFrame_t *pFrame )
{
if ( VmbFrameStatusComplete == pFrame ->receiveStatus )
{
printf( "Frame successfully received\n" );
}
else
{
printf( "Error receiving frame\n" );
}
VmbCaptureFrameQueue( hCamera , pFrame , FrameDoneCallback );
}
// Get all known cameras, see chapter "List available cameras"
// and open the camera as shown in chapter "Opening a camera"
// Get the required size for one image
err = VmbPayloadSizeGet( hCamera , &nPLS );
for ( int i=0; i<FRAME_COUNT; ++i )
{
// Allocate accordingly
frames[i]. buffer = malloc( nPLS ); (B)
frames[i]. bufferSize = nPLS; (B)
// Anounce the frame
VmbFrameAnnounce( hCamera , frames[i], sizeof(VmbFrame_t) );
}
// Start capture engine on the host
err = VmbCaptureStart( hCamera );
// Queue frames and register callback
for ( int i=0; i<FRAME_COUNT; ++i )
{
VmbCaptureFrameQueue( hCamera , frames[i],
FrameDoneCallback );
}
// Start acquisition on the camera
err = VmbFeatureCommandRun( hCamera , "AcquisitionStart" );
// Program runtime ...
// When finished , tear down the acquisition chain , close the camera and Vimba X.
err = VmbFeatureCommandRun( hCamera , "AcquisitionStop" );
err = VmbCaptureEnd( hCamera );
err = VmbCaptureQueueFlush( hCamera );
err = VmbFrameRevokeAll( hCamera );
err = VmbCameraClose( hCamera );
err = VmbShutdown ();
Struct VmbFrame_t
The struct VmbFrame_t represents not only the actual image data, but also additional information. You can find the referenced data types in the tables below.
Tip
The field “void* buffer” of the struct can be NULL when the struct ist passed to
VmbFrameAnnounce. In this case, the “alloc and announce” function of the TL
allocates buffer memory.
Struct entry |
Type |
|---|---|
void* buffer |
Pointer to the actual image data |
VmbUint32_t bufferSize |
Size of the data buffer |
void* context[4] |
4 void pointers that can be employed by the |
VmbFrameStatus_t receiveStatus |
Resulting status of the receive operation |
VmbFrameFlags_t receiveFlags |
Flags indicating which additional frame |
VmbUint32_t chunkSize |
Size of the chunk data inside the data buffer |
VmbPixelFormat_t pixelFormat |
Pixel format of the image |
VmbUint32_t width |
Width of an image |
VmbUint32_t height |
Height of an image |
VmbUint32_t offsetX |
Horizontal offset of an image |
VmbUint32_t offsetY |
Vertical offset of an image |
VmbUint64_t frameID |
Unique ID of this frame in this stream |
VmbUint64_t timestamp |
Timestamp set by the camera |
Enumeration |
Integer Value |
Purpose |
|---|---|---|
VmbFrameStatusComplete |
0 |
Frame was completed without errors |
VmbFrameStatusIncomplete |
-1 |
Frame could not be filled to the end |
VmbFrameStatusInvalid |
-3 |
Frame buffer was invalid |
Enumeration |
Integer Value |
Purpose |
|---|---|---|
VmbFrameFlagsNone |
0 |
No additional information is provided |
VmbFrameFlagsDimension |
1 |
Frame’s dimension is provided |
VmbFrameFlagsOffset |
2 |
Frame’s offset is provided (ROI) |
VmbFrameFlagsFrameID |
4 |
Frame’s ID is provided |
VmbFrameFlagsTimestamp |
8 |
Frame’s timestamp is provided |
Transforming images
To transform images received via the API into common image formats, use the Image Transform Library.
See also
For a quick start, see the AsynchrounousGrab example, which contains an image transformation.
Using Events
Events serve many purposes and can have several origins such as generic
camera events or just feature changes.
All of these cases are handled in the C API uniformly with the same
mechanism: You simply register a notification callback with
VmbFeatureInvalidationRegister() for the feature of your
choice which gets called when there is a change to that feature.
Three examples are listed in this chapter:
Camera list notifications
Camera event features
Tracking invalidations of features
Getting notified about discovery events
// 1. define callback function
void VMB_CALL CameraListCB( VmbHandle_t handle , const char* name , void* context )
{
char cameraName [255];
VmbUint32_t sizeFilled;
const char* callbackReason;
// Get the name of the camera due to which the callback was triggered
VmbFeatureStringGet( handle , "EventCameraDiscoveryCameraID", cameraName,
sizeof(cameraName), &sizeFilled );
// Get the reason why the callback was triggered. Possible values:
// Missing (0), a known camera disappeared from the bus
// Detected (1), a new camera was discovered
// Reachable (2), a known camera can be accessed
// Unreachable (3), a known camera cannot be accessed anymore
VmbFeatureEnumGet( handle , "EventCameraDiscoveryType", &callbackReason );
printf( "Event was fired by camera %s because %s\n", cameraName ,
callbackReason );
}
// 2. register the callback for that event
VmbFeatureInvalidationRegister( gVmbHandle , "EventCameraDiscovery",
CameraListCB , NULL );
Note
Per default, camera discovery events are only effective for the known
interfaces. If you want to get notified about new cameras from a new
interface we recommend registering the event EventInterfaceDiscovery,
which will make sure that new interfaces are discovered.
Getting notified about feature invalidations
// 1. define callback function
void VMB_CALL WidthChangeCB( VmbHandle_t handle , const char* name , void* context )
printf( "Feature changed: %s\n", name );
}
// 2. register callback for changes to Width
VmbFeatureInvalidationRegister( cameraHandle , "Width", WidthChangeCB , NULL );
// as an example , binning is changed , so the callback will be run
VmbFeatureIntegerSet( cameraHandle , "Binning", 4 );
Getting notified about camera events
// 1. define callback function
void VMB_CALL EventCB( VmbHandle_t handle , const char* name , void* context )
{
printf( "Event was fired: %s\n", name );
}
// 2. select "AcquisitionStart" event
VmbFeatureEnumSet( cameraHandle , "EventSelector", "AcquisitionStart" );
// 3. switch on the event notification
VmbFeatureEnumSet ( cameraHandle , "EventNotification", "On" );
// 4. register the callback for that event
VmbFeatureInvalidationRegister( cameraHandle , "EventAcquisitionStart",
EventCB , NULL );
Chunk
Chunk data are image metadata such as the exposure time that are available in the Frame
that contains the chunk data.
To access chunk data, use VmbChunkAccessCallback.
Required parameters:
The frame handle that contains the chunk data (VmbFrame_t)
Callback to access the chunk data
Pointer for passing custom data in and out the function
// Data structure for passing Chunk data values to and from the Chunk Data Access Callback function
// This should be adjusted for the Chunk features that are available for a specific camera
// In this example, the camera supports the Chunk features:
// ChunkWidth, ChunkHeight, ChunkOffsetX, ChunkOffsetY
typedef struct
{
VmbInt64_t m_width;
VmbInt64_t m_height;
VmbInt64_t m_offsetX;
VmbInt64_t m_offsetY;
} ChunkData;
// We may use custom error codes as return values for the Chunk Data Access Callback function
static const VmbError_t ChunkOffsetAccessError = VmbErrorCustom + 0;
static const VmbError_t ChunkSizeAccessError = VmbErrorCustom + 1;
// Chunk features are only accessible in the Chunk Data Access Callback function
VmbError_t VMB_CALL MyChunkDataAccessCallback(VmbHandle_t featureAccessHandle, void* userContext)
{
ChunkData* chunkData = ((ChunkData*)(userContext));
// With the featureAccessHandle, Chunk features can be accessed like any other camera feature
if ( (VmbFeatureIntGet(featureAccessHandle, "ChunkWidth", &chunkData.m_width) != VmbErrorSuccess)
|| (VmbFeatureIntGet(featureAccessHandle, "ChunkHeight", &chunkData.m_height) != VmbErrorSuccess) )
{
return ChunkSizeAccessError;
}
if ( (VmbFeatureIntGet(featureAccessHandle, "ChunkOffsetX", &chunkData.m_offsetX) != VmbErrorSuccess)
|| (VmbFeatureIntGet(featureAccessHandle, "ChunkOffsetY", &chunkData.m_offsetY) != VmbErrorSuccess) )
{
return ChunkOffsetAccessError;
}
return VmbErrorSuccess;
}
void VMB_CALL MyFrameCallback(const VmbHandle_t cameraHandle, const VmbHandle_t streamHandle, VmbFrame_t* frame)
{
if (frame->chunkDataPresent)
{
ChunkData chunkData;
// The function VmbChunkDataAccess will prepare the Chunk data access for the current frame
// The Chunk features can be accessed in the passed Chunk Data Access Callback function
// Chunk feature values are passed in the ChunkData struct
VmbError_t err = VmbChunkDataAccess(frame, MyChunkDataAccessCallback, &chunkData);
if (err == VmbErrorSuccess)
{
// Print the Chunk features for the current frame
printf("Frame received: FrameId=%llu; Width=%lld; Height=%lld; OffsetX=%lld; OffsetY=%lld\n",
frame->frameID, chunkData.m_width, chunkData.m_height, chunkData.m_offsetX, chunkData.m_offsetY);
}
else
{
// Error handling
// VmbChunkDataAccess returns the same error value as the Chunk Data Access Callback function,
// e.g. our custom error codes ChunkSizeAccessError and ChunkOffsetAccessError
}
}
VmbCaptureFrameQueue(cameraHandle, frame, MyFrameCallback);
}
Saving and loading settings
See also
For a quick start, see the LoadSaveSettings example.
Additionally to the user sets stored inside the cameras, you can save the
feature values of the GenTL modules as an XML file to your host PC. To do this, use the functions
VmbSettingsLoad and VmbSettingsSave.
To control which features are saved, use the (optional) flags and struct listed below. You can manually edit the XML file if you want only certain features to be restored.
Note
Saving and loading all features including look-up tables may take several minutes.
The API supports saving and loading settings for every GenTL module. To specify which settings are saved and loaded when passing a camera handle, the API contains a set of (optional) flags.
Note
A settings XML file can only contain features for one instance of a module.
The struct VmbFeaturePersistSettings_t contains the optional member cameraPersistFlags. It is only evaluated if a cameraHandle is passed to the load/save functions and ignored for the other module handles.
Struct Entry |
Purpose |
|---|---|
VmbFeaturePersist_t persistType |
Controls which features are saved. Valid values: |
VmbCameraPersistFlags_t |
Optional flags, see above |
Vmbuint32_t maxIterations |
Number of iterations. LoadCameraSettings iterates |
VmbUint32_t |
Logging level |
VmbCameraPersistFlagsNone |
0x00 |
|---|---|
VmbCameraPersistFlagsTransportLayer |
0x01 |
VmbCameraPersistFlagsInterface |
0x02 |
VmbCameraPersistFlagsRemoteDevice |
0x04 |
VmbCameraPersistFlagsLocalDevice |
0x08 |
VmbCameraPersistFlagsStreams |
0x10 |
VmbCameraPersistFlagsAll |
0ff |
If the flags are not set (=VmbCameraPersistFlagsNone), the default behavior is to only save/load the remote device features. The same behavior is applied if no VmbFeaturePersistSettings_t parameter is passed to the save/load functions.
Tip
If you pass a camera handle and activate all flags, the features of all GenTL modules including the transport layer and the interface are saved.
Triggering
Note
Before triggering, startup the API and open the camera(s).
External trigger
The following code snippet shows how to trigger your camera with an external device.
// Startup Vimba X, get cameras and open cameras as usual
// Trigger cameras according to their interface
// Configure trigger input line and selector , switch trigger on
switch( pInterfacetype )
{
case VmbInterfaceEthernet:
VmbFeatureEnumSet( pCameraHandle , "TriggerSelector", "FrameStart" );
VmbFeatureEnumSet( pCameraHandle , "TriggerSource", "Line1" );
VmbFeatureEnumSet( pCameraHandle , "TriggerMode", "On" );
break;
// USB: VmbInterfaceUsb
// CSI-2: VmbInterfaceCSI2
case VmbInterfaceUsb:
VmbFeatureEnumSet( pCameraHandle , "LineSelector", "Line0" );
VmbFeatureEnumSet( pCameraHandle , "LineMode", "Input" );
VmbFeatureEnumSet( pCameraHandle , "TriggerSelector", "FrameStart" );
VmbFeatureEnumSet( pCameraHandle , "TriggerSource", "Line0" );
VmbFeatureEnumSet( pCameraHandle , "TriggerMode", "On" );
break;
}
Trigger over Ethernet – Action Commands
Triggering via the AcquisitionStart command is supported by all cameras.
However, it is less precise than triggering with an external device connected
to the camera’s I/O port. Some GigE cameras additionally support Action Commands.
With Action Commands, you can broadcast a trigger signal simultaneously to
multiple GigE cameras via GigE cable.
Action Commands must be set first to the camera(s) and then to the TL,
which sends the Action Commands to the camera(s). As trigger source,
select Action0 or Action1.
ActionControl parameters
The following ActionControl parameters must be configured on the camera(s) and on the TL.
ActionDeviceKey must be equal on the camera and on the host PC. Before a camera accepts an Action Command, it verifies if the received key is identical with its configured key. Note that ActionDeviceKey must be set each time the camera is opened. Range (camera and host PC): 0 to 4294967295
ActionGroupKey means that each camera can be assigned to exactly one group for Action0 and a different group for Action1. All grouped cameras perform an action at the same time. If this key is identical on the sender and the receiving camera, the camera performs the assigned action. Range (camera and host PC): 0 to 4294967295
ActionGroupMask serves as filter that specifies which cameras within a group react on an Action Command. It can be used to create sub-groups. Range (camera): 0 to 4294967295 Range (host PC): 1 to 4294967295
Executing the feature ActionCommands sends the ActionControl parameters to the cameras and triggers the assigned action, for example, image acquisition. Before an Action Command is executed, each camera validates the received ActionControl parameter values against its configured values. If they are not equal, the camera ignores the command.
// Additionally to this code snippet:
// Configure the trigger settings and add image streaming
VmbUint32_t count;
VmbCameraInfo_t* cameras;
VmbHandle_t* handles;
int deviceKey = 11, groupKey = 22, groupMask = 33;
// Start Vimba and discover GigE cameras
VmbStartup( NULL );
// Get cameras
VmbCamerasList( NULL, 0, &count, sizeof(*cameras) );
cameras = (VmbCameraInfo_t *) malloc( count * sizeof(*cameras) );
VmbCamerasList( cameras, count, &count, sizeof(*cameras) );
// Allocate space for handles
handles = (VmbHandle_t*) malloc( count * sizeof(VmbHandle_t) );
for( int i=0; i<count; ++i )
{
const char* cameraId = cameras[i].cameraIdString;
// Open camera
VmbCameraOpen( cameraId, VmbAccessModeFull, &handles[i] );
// Set device key, group key and group mask
// Configure trigger settings (see programming example)
VmbFeatureIntSet( handles[i], "ActionDeviceKey", deviceKey );
VmbFeatureIntSet( handles[i], "ActionGroupKey", groupKey );
VmbFeatureIntSet( handles[i], "ActionGroupMask", groupMask );
}
// Set Action Command to API
// Allocate buffers and enable streaming (see programming example)
VmbFeatureIntSet( gVmbHandle, "ActionDeviceKey", deviceKey );
VmbFeatureIntSet( gVmbHandle, "ActionGroupKey", groupKey );
VmbFeatureIntSet( gVmbHandle, "ActionGroupMask", groupMask );
// Send Action Command
VmbFeatureCommandRun( gVmbHandle, "ActionCommand" );
// If no further Actions will be applied: close cameras, shutdown API, and
// free allocated space as usual
See also
Find more details in the application note: Trigger over Ethernet (ToE) - Action Commands
Listing interfaces
You can list all found interfaces such as frame grabbers or NICs.
VmbInterfacesList() enumerates all interfaces recognized
by the underlying transport layers.
VmbUint32_t nCount;
VmbInterfaceInfo_t *pInterfaces;
// Get the number of connected interfaces
VmbInterfacesList( NULL , 0, &nCount , sizeof *pInterfaces );
// Allocate accordingly
pInterfaces = (VmbInterfaceInfo_t *) malloc( nCount * sizeof *pInterfaces );
// Get the interfaces
VmbInterfacesList( pCameras , nCount , &nCount , sizeof *pInterfaces );
Struct VmbInterfaceInfo_t
Struct VmbInterfaceInfo_t provides the entries listed in the table below for obtaining read-only information about an interface.
Type |
Field |
Purpose |
|---|---|---|
const char* |
interfaceIdString |
Unique identifier for each interface |
VmbTransportLayerType_t |
interfaceType |
See VmbTransportLayerType |
const char* |
interfaceName |
Given by the TL |
VmbHandle_t |
transportLayerHandle |
For TL system module feature access |
VmbHandle_t |
interfaceHandle |
For interface module feature access |
Enabling notifications of changed interface states
To get notified whenever an interface is detected or disconnected, use
VmbFeatureInvalidationRegister() to register the event EventInterfaceDiscovery.
Use the global Vmb handle for registration. The function pointer to
the callback function has to be of type VmbInvalidationCallback().
The callback gets executed on the according interface discovery event.
TL enumerations
Tip
The CSI TL is listed as VmbTransportLayerTypeCustom.
Enumeration |
Integer Value |
Interface |
|---|---|---|
VmbTransportLayerTypeUnknown |
0 |
Interface is not known to the API |
VmbTransportLayerTypeGEV |
1 |
GigE Vision |
VmbTransportLayerTypeCL |
2 |
Camera Link |
VmbTransportLayerTypeIIDC |
3 |
IIDC 1394 |
VmbTransportLayerTypeUVC |
4 |
USB video class |
VmbTransportLayerTypeCXP |
5 |
CoaXPress |
VmbTransportLayerTypeCLHS |
6 |
Camera Link HS |
VmbTransportLayerTypeU3V |
7 |
USB3 Vision Standard |
VmbTransportLayerTypeEthernet |
8 |
Generic Ethernet |
VmbTransportLayerTypePCI |
9 |
PCI / PCIe |
VmbTransportLayerTypeCustom |
10 |
Non standard |
VmbTransportLayerTypeMixed |
11 |
Mixed (System module only) |
Note
Functions that must not be called be called within the callback routine:
VmbStartup
VmbShutdown
VmbFeatureIntSet (and any other VmbFeature*Set function)
VmbFeatureCommandRun
Error codes
You can find Vimba X error codes in section Troubleshooting.
If your TL or camera is not found or if you experience other issues, see also Troubleshooting.
Logging
You can find information about logging in section Troubleshooting.